A Sensitive Subject
Type an email on your computer. Raise a glass to your lips. Feel for the light switch in a dark room. Simple, everyday tasks can demand subtle interactions between our hands and our surroundings, but, surprisingly, much remains unknown about the mechanics of the sense of touch.
“Most people don’t have a very clear picture of how touch sensation actually arises,” said UC Santa Barbara faculty member Yon Visell, an assistant professor in the Department of Electrical and Computer Engineering, in the Department of Mechanical Engineering and in the campus’s Media Arts and Technology graduate program. While people are familiar with touch as consisting of the interaction between two surfaces — the skin and whatever it is in contact with — they are less aware of the subtle ways that touch sensing helps us to identify and navigate our surroundings, he said.
For instance, if your fingers are numb, you may still be able to move them, but be hesitant to pick up an object or send a text message, because of the lack of sensation — think of what happens when your foot or arm falls asleep. According to a study co-authored by Visell that appears in the Proceedings in the National Academy of Sciences, our hands in particular have access to rich tactile information that travels far beyond the tips of our fingers. This may help to explain some remarkable capabilities of the sense of touch — why, for example, people whose fingers have been anesthetized are still able to feel fine surface detail, as has been demonstrated in prior research.
“The way they seem to be able to do this is by using mechanical signals, or vibrations, that travel beyond the fingers, farther up the arm,” said Visell. “The hand has specialized sensory end organs distributed widely in it that can capture such mechanical vibrations at a distance.”
Their study used a specialized array of tiny accelerometers, or vibration sensors, worn on the sides and backs of the fingers and hands. With this device, the researchers were able, for the first time, to capture, catalog and analyze patterns of vibration in the skin of the whole hand that were produced during active touch. Actions such as tapping and sliding one or several fingers over different types of material, as well grasping, gripping and indirect tapping (using an object to tap on a surface) all gave rise to distinctive vibration signatures. “We can liken this to the different ways that a bell will sound if it is struck by a metal hammer or a rubber mallet,” said Visell.
“How do those signals reflect what it is that we’re doing and what it is we’re touching? Do parts of the hand nearer to the wrist receive significant information about the shape of the object that we’re touching, what it’s composed of, or how we’re touching it? How are different parts of the hand involved in touch sensing?” Visell said of the fundamental questions that motivated his group to pursue this research. “It is possible that the hand, like the ear, is able to use vibrations produced through contact in order to infer what is being touched, and how the hand is touching it.”
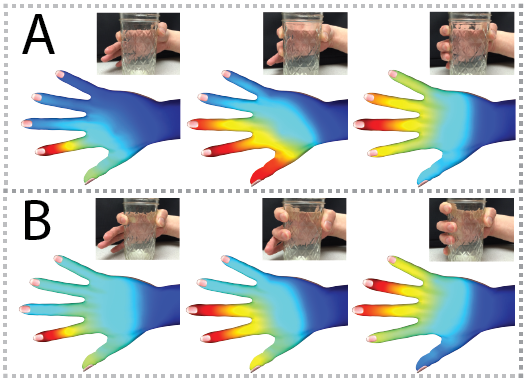
According to the study, the vibrations generated through touch, and the distribution of vibrations in the hand, depend very closely on the type of action and the object being manipulated. For instance, vibration patterns produced by tapping a single finger were stronger than those made by grasping, gripping or sliding, but were much more localized in the finger. The patterns of vibration throughout the skin of the hand also varied according to the number of fingers used, the object being manipulated and the action being performed. Tapping the index and middle finger alone was sufficient to elicit vibrations that covered most of the surface of the hand. Even the size of the object being grasped – for example, whether a glass was small or large — influenced the vibrations that were felt by the hand.
The applications for the information gained in this study are many. They may contribute not only to the foundations of our understanding of touch, but also contribute to fields such as virtual reality by enabling wearable technologies that allow the user to feel if he or she is picking up a feather or a brick while visiting a virtual world. This work may also enable robots to touch and interact more effectively within changing and uncertain environments, and allow future generations of prosthetic hands to provide their wearers with more natural touch feedback, enabling a greater range of functionality to be restored.
Share this article
Related Stories



